当城区 NOA 装车量突破 300 万,渗透率跨过 15%,智能驾驶正式从 “有没有” 的普及阶段,进入 “好不好用、安不安全” 的高质量阶段。
但行业也同步暴露出最真实的短板:功能可以快速装车,体验却难以快速达标;场景可以快速开通,用户信心却迟迟跟不上。热词越来越多,用户评价却越来越直白:能用,但不放心;会开,但不自然。
问题到底出在哪?答案不是某一个功能没做好,而是整个系统的进化方式出了问题。
传统智驾架构更像一个 “拼凑型团队”:感知、规控、评估各干各的,靠大量规则与工程调试强行串联。遇到新场景,就加一条规则;遇到问题,就打一个补丁。结果系统越来越臃肿,迭代越来越慢,体验越来越割裂。
更致命的是,数据被分散在不同车型、不同平台、不同子模型里,无法形成合力,再多数据也喂不出一个更懂路况的 “老司机”。
行业迫切需要一场底层变革:从模块优化,走向统一驱动;从人工调试,走向模型自进化。
在 2026 GTC 大会上,元戎启行、理想、小米等玩家不约而同指向同一个方向:统一基座模型。不再满足于局部小修小补,而是从架构层面重新设计智驾系统。
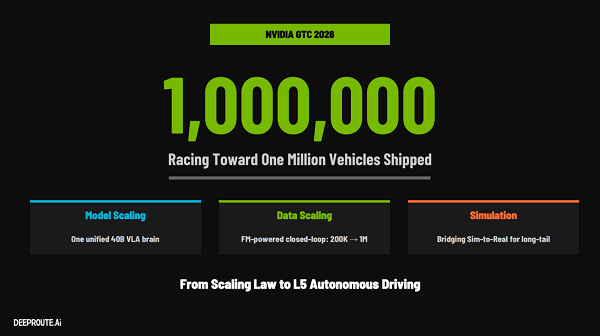
元戎启行的思路尤为彻底:推出 40B 参数 VLA 基座模型,用一个模型统一感知、理解、决策、评估全链路,让数据闭环全面自动化。
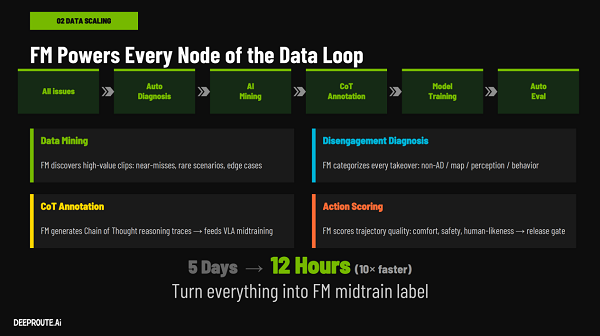
这套系统不只是负责开车,还能看懂场景、判断风险、评估驾驶质量、自动挖掘高价值案例。它把智驾从 “手工打造” 升级为 “AI 原生”,把迭代周期从 5 天缩短到 12 小时,实现 10 倍提速。
这种底层变革,最终会体现在用户最关心的地方:更稳、更顺、更放心。面对施工占道、无保护路口、异形障碍物等传统难点,统一模型能做出更连贯、更像人类的决策,大幅减少突兀加减速与犹豫迟疑。
对主机厂而言,统一基座意味着更短的适配周期、更一致的安全表现、更可控的交付质量;对行业而言,则意味着技术真正从工程堆料,进入 AI 驱动的高质量增长阶段。
市场数据已经给出最直接的反馈。依托稳定的体系化能力,元戎启行在第三方城区 NOA 赛道实现高速增长,累计交付超 25 万辆,并剑指 2026 年百万辆目标。
这背后是技术路线的胜利:用户与主机厂,最终都会选择更可靠、更高效、更可持续进化的方案。
行业格局已经越来越清晰:下一阶段的智能驾驶,比拼的不再是单点功能,而是系统进化力。
谁能拥有统一基座、高效迭代、规模数据的完整体系,谁就能在未来竞争中占据主动。那些停留在补丁式优化、项目式交付、碎片化数据的玩家,将逐渐被拉开差距。
从热词混战到回归本质,从功能堆砌到系统重构,智能驾驶正在完成一场关键蜕变。而统一基座模型,正是这场蜕变的核心标志。